11 月 25 日至 27 日,“智驭空天”第十一届中国研究生未来飞行器创新大赛在珠海落下帷幕。本届大赛是由教育部学位管理与研究生教育司指导,中国学位与研究生教育学会和中国科协青少年科技中心主办,中国宇航学会、中国航空学会联合主办,由珠海市教育局、北京理工大学(珠海)承办,吸引了全国各高校优秀研究生团队同台竞技。成人电影
参赛团队紧扣赛事主题,聚焦飞行器设计、技术攻关等关键环节,提交的作品兼具创新性与实用性,最终在激烈角逐中成功斩获一等奖 2 项、二等奖 7 项、三等奖 3项。
获奖作品简介:
跨域巡航团队
作品名称:空水双模态涡轮-水冲压一体化组合动力系统
参与赛项:常规赛道-1.3 未来飞行器动力系统关键技术专题
所获奖项:亚军
指导教师:李江、胡春波
参赛队员:徐钦睿、陈榆、赵博逸、孟鑫、王博涵
作品简介:本作品创新性地提出一种基于空气涡轮火箭与水冲压发动机的组合动力系统,该系统通过共用一套涡轮增压装置,实现空中与水下的高效动力切换,成功解决了跨介质飞行器长期面临的高速突防与重复跨介质能力不可兼得的核心难题。本作品完成了新型空/水共用补燃室一体化构型设计,首创涡轮增压系统驱动的水冲压增压启动方案,并建立了基于车用增压器的空气涡轮火箭发动机新模态。
团队照片:

超新星雕刻者协会
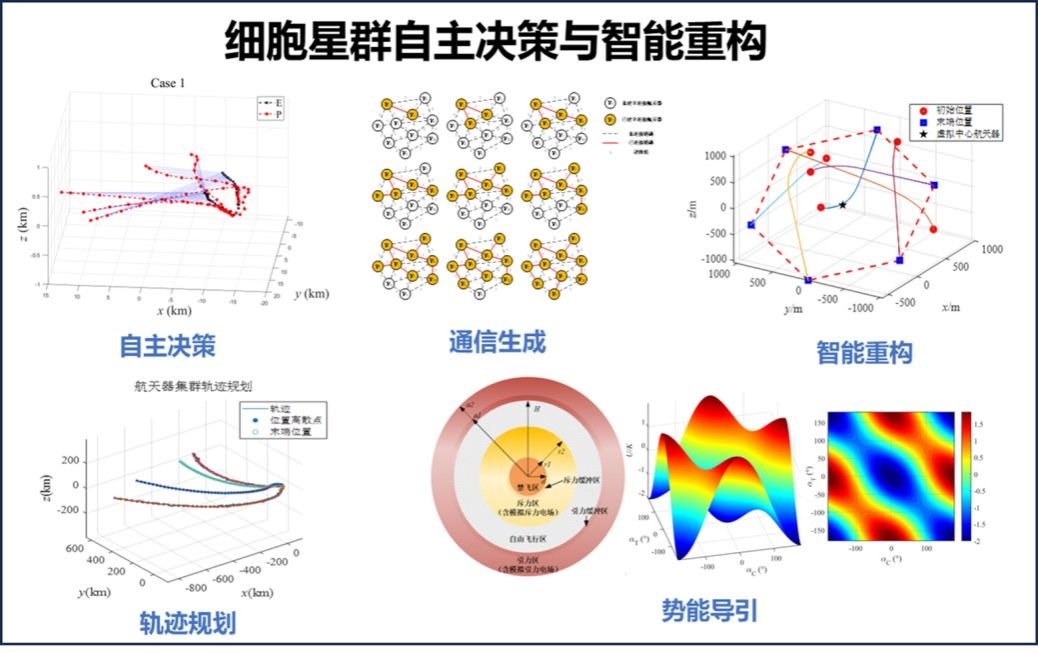
作品名称:轨智天工:航天器集群在轨自主智能重构系统
参与赛项:常规赛道-1.8 无人飞行器集群协同技术专题
所获奖项:一等奖
指导教师:刘闯
参赛队员:舒马赫、罗义杰、骆轩宇、余卫倬、吕佰梁
作品简介:
本项目基于仿生理念构建标准化“细胞卫星”模块,搭载轻量化电磁对接装置实现毫米级无接触精准连接。系统集成深度强化学习算法,实现集群在复杂约束下的智能协同决策与轨迹规划。采用自适应滑模控制、预设时间重构与非脆弱控制策略,确保在扰动、故障及参数波动下的高精度轨迹跟踪与姿态稳定。该体系旨在完成在轨自主组装大型空间设施、执行非合作目标接管及空间碎片清理等任务,具备强鲁棒性、高自主与可扩展性。
团队照片:

宇安卫队
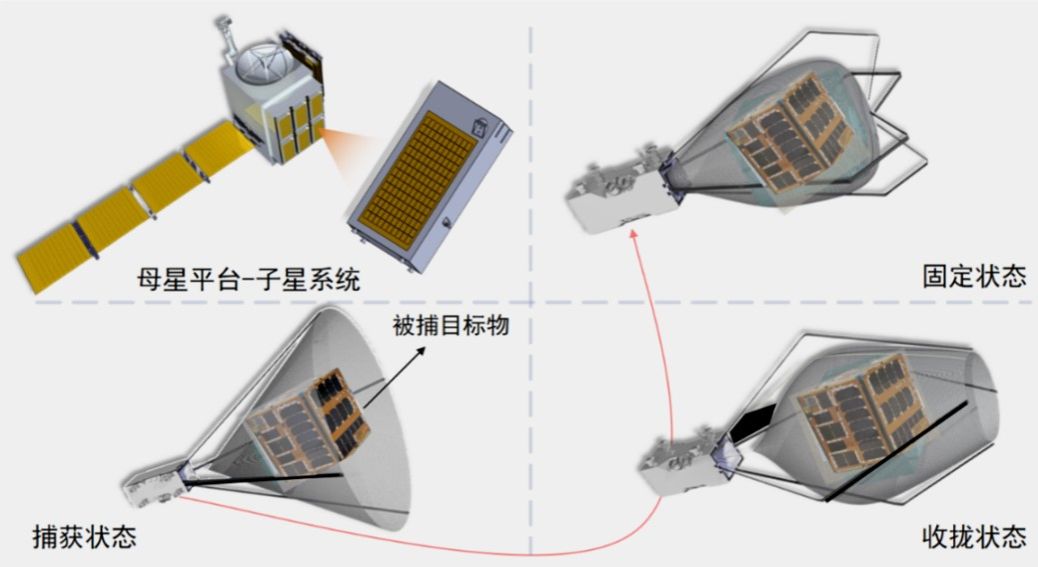
作品名称:空间绳网捕获微小卫星平台
参与赛项:常规赛道-1.2 航天飞行器总体及分系统设计
所获奖项:二等奖
指导教师:郭宁
参赛队员:徐凡祺、王浩宇、贺昊康、郑文睿、郭子妍
作品简介:
本项目面向空间碎片日益增多、太空碰撞风险加剧的现实挑战,提出一种用于空间碎片清理的绳网捕获微小卫星平台创新方案。其核心围绕三大创新展开:一是平台重构创新,采用“母星平台+轻量子星”的模块化分布式架构,支持一体发射、多星部署与多次任务执行,从根本上突破了传统单星定制的高成本模式。二是机构设计创新,基于双稳态复合材料研制柔性支撑与释放机构,实现了发射时的高收纳比与工作状态下的高结构刚度,显著提升了运载效率和空间部署能力。三是智能控制创新,通过“分级智能”决策与“宽域包络”捕获策略,将传统高精度交会对接转变为大范围稳健缠绕包裹,大幅提升了系统对非合作目标的捕获容错率和任务整体鲁棒性。该平台集高容错性、轻量化与低成本优势于一身,为未来空间安全维护与在轨服务提供了极具前景的工程解决方案。
团队照片:

空间顺风耳
作品名称:天穹智联:超大型相控阵在轨构建技术
参与赛项:常规赛道-1.2 航天飞行器总体及分系统设计
所获奖项:二等奖
指导教师:罗建军
参赛队员:岳聚良、刘文锦、武黎明、乔巍麓
作品简介:
本项目围绕未来航天装备对尺寸极大、组装复杂、控制困难的空间相控阵天线需求,提出了“模块化设计-并行自组装-分布式协同”三位一体的在轨构建与控制技术体系。创新性提出基于折纸结构的“翼阵合一”天线模块化设计,将天线、能源与姿轨控能力集成于智能单元,实现大规模阵列的轻质展开与灵活拼接;构建多机器人多工位并行自主组装方法,创新序列规划、多目标联合分配与柔顺对接控制,显著提升组装效率与鲁棒性;面向极大柔性阵列的高精度指向需求,提出多智能体分布式协同控制方法,突破分布式异构智能体协同控制技术。
团队照片:

智擎动力
作品名称:智擎—新一代高超声速强机动靶机的宽域智能组合动力系统
参与赛项:常规赛道-1.3 未来飞行器动力系统关键技术专题
所获奖项:二等奖
指导教师:石磊
参赛队员:田照阳、傅岸祥、张旭、姚瑶、豆一涵
作品简介:本作品以突破传统动力系统局限为目标,提出一种面向高超声速强机动靶机的宽域内嵌源流智能组合动力系统。将智能化内嵌源流与冲压发动机深度集成,通过智能化调控实现宽域亚声速—超声速—高超声速的全飞行域稳定推进。该方案能够兼具宽速域适应性与大推力快速调节能力,能够为靶机在执行高速巡航、末端强机动、规避等复杂飞行任务中提供稳定、可靠的动力支撑,从而显著提升对抗训练和装备验证的真实性与有效性。同时,该理念具备较强拓展潜力,未来可应用于临近空间运输平台、天地往返飞行器等多领域任务。
团队照片:

环宇月行
作品名称:“巡月探客”——面向未来月面探索任务的新型仿生气动软体机器人
参与赛项:常规赛道-1.7 深空探测器设计专题
所获奖项:二等奖
指导教师:郑子轩
参赛队员:苏海昀、王晟昊、朱广通、欧阳辰昊、张延
作品简介:
面向月面非结构化地形,本团队设计了一种基于仿生灵感的气动软体机器人,该机器人具备双运动模态,可以根据不同地形自主切换运动方式。凭借强大的运动性能,该机器人可以实现越障、垮沟,并探索如月溪、月坑等传统探月器难以探测的复杂区域。
本作品具有以下创新点:1、设计了一种具备爬行和跳跃双模态运动方式的由气体驱动的软体机器人,利用月面微重力环境对弹跳的“放大”,使得机器人的运动性能较传统刚性探月器有显著提升;2、针对所设计的机器人,提出了一种基于数据驱动的无模型自适应气压调控方法,由机器人运动状态和所处地形,反馈所需气压和运动模态并自行调整,以实现精细化运动控制。
团队照片:

空天飞行队
作品名称:人机共智:有人/无人集群空战的多维可解释创新协同方案
参与赛项:常规赛道-1.8 无人飞行器集群协同技术专题
所获奖项:二等奖
指导教师:张栋
参赛队员:杨书恒、熊感、沈逢馨、任智
作品简介:首创“感知、规划、决策”全链路可解释的有人/无人集群协同空战方案,针对性破解智能决策“黑箱”引发的信任与应用瓶颈。构建透明化决策框架,将可解释性深度融入协同全流程,实现轨迹预测、机动决策的依据透明可溯,筑牢人机互信基础。将群体动力学机制作为约束嵌入神经网络,实现集群行为精准预测。搭建自进化协同训练体系,引导集群自主涌现复杂战术,并通过可解释结果反向优化训练。该方案已通过半实物与真实飞行试验验证,为强对抗环境下可信、可靠的智能空战提供了创新性技术路径。
团队照片:

幻化魔方
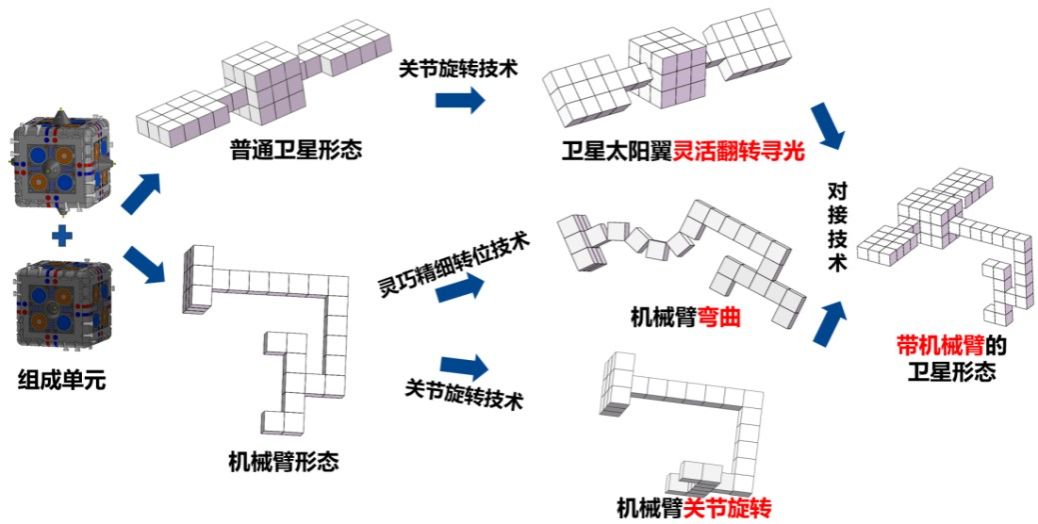
作品名称:幻化魔方——面向立方星群的自主动态变构系统
参与赛项:常规赛道-1.9 微小卫星设计及应用技术专
所获奖项:二等奖
指导教师:徐超
参赛队员:赵梓桓、李世龙、马紫晨、姜迪午、赵畇雯
作品简介:本项目针对模块化立方星群灵活性变构的需求,提出一种面向立方星群的自主动态变构系统。作品采用标准化和模块化设计理念,综合利用电磁对接技术、关节旋转技术、灵巧精细转位技术,能够使立方星单元灵活组装成多变构型的卫星或机械臂,且变化过程中无需任何其他设备辅助,是一种创新的灵巧变构型航天器技术方案。组装形成的航天器拥有较高的自由度,能够实现灵巧空间操作或通过变构完成对地、对天观测和通信等任务。
团队照片:

灵境探索者
作品名称:“同辉”应急无人机集群智控平台报告书
参与赛项:交叉赛道-3.1 低空经济新业态探索
所获奖项:二等奖
指导教师:张栋
参赛队员:张馨月、郑英杰
作品简介:针对信息孤岛、协同效率不足和经济不可持续三大难题,平台以无人机集群为核心载体,结合微内核架构SwarmMind-集群任务筹划与决策软件为核心,联动 SkyWatch-BSS 地面监控软件与 SimForge-三维态势推演与仿真软件,形成“感知—决策—执行—演练”的闭环体系,并以硬件为基础保障其可靠运行。这一架构不仅能在灾害救援中实现高效、智能和可持续的应急响应,更推动了应急装备建设从一次性消耗。向长期价值创造转型,体现了技术进步、经济效益与社会效能的深度融合。

团队照片:
海天擎跃团队
作品名称:双栖破界-变构进气道双燃料跨介质动力系统
参与赛项:常规赛道-1.3 未来飞行器动力系统关键技术专题
所获奖项:三等奖
指导教师:胡春波、李超
参赛队员:董佳欣、关展鹏、韩文学、赵博逸、王正阳
作品简介:
海天擎跃团队设计了一种跨介质动力系统原型,集成双燃料智能供给系统、环形粉末喷注器、变构进气道与多模态燃烧室等核心结构。系统采用镁基贫氧燃料与铝粉燃料协同供给,可在空/水介质间实现快速动力切换与推力调节。通过环形喷注与涡流进水通道实现燃料高效掺混燃烧,并利用自适应变构进气道调节流场,实现跨介质环境下的稳定燃烧与高效推进。
团队照片:

探索远方
作品名称:应用于双小行星引力场探测无拖曳立方星设计
参与赛项:常规赛道-1.7 深空探测器设计专题
所获奖项:三等奖
指导教师:刘睿
参赛队员:刘伟、刘晨阳
作品简介:本作品设计了应用于双小行星系统引力场探测的无拖曳立方星,将无拖曳系统与立方星平台相结合,设计了一种极具可行性的无拖曳立方星方案。以双小行星系统66391(1999 KW4)为探测对象,应用多面体法进行引力场建模仿真,设计基于梯度下降算法的全局搜索方法搜索周期轨道。在立方星受到的光压摄动后,最终会撞击小行星或发散。为消除光压摄动影响,作品设计无拖曳控制方法,应用自抗扰控制方法。最终,通过仿真验证了该控制方法可以消除光压摄动影响,使立方星运行在纯引力轨道上,完成引力场探测任务。
团队照片:

空间锦衣卫
作品名称:天穹智盾:空间多智能体协同博弈防御系统
参与赛项:常规赛道-1.8 无人飞行器集群协同技术专题
所获奖项:三等奖
指导教师:罗建军、马卫华
参赛队员:景志航、余雨芯、石欣悦、尤浩楠、张金文
作品简介:
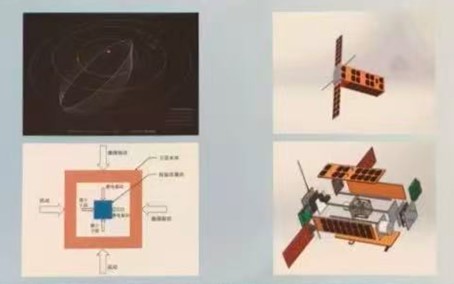
“天穹智盾”是一套面向空间安全的全链条智能防御系统,旨在应对日益复杂的空间非合作目标威胁。系统以“智能、协同、自适应”为核心设计理念,构建了从态势感知、威胁评估、任务规划到博弈决策的完整技术闭环,实现对高价值航天器的协同、智能防护。
作品基于“任务完成度”的智能威胁评估,将抽象的威胁转化为具象的成像效能评估;采用事件触发与分布式博弈协商机制,实现多防御器在动态环境下的快速自主任务规划;引入相对可达域椭球理论,结合改进的博弈算法,形成多层次自适应决策能力,可智能执行拦截、驱离等任务。
团队照片:
文图:宋佳 徐钦睿 舒马赫 徐凡祺 岳聚良 田照阳 苏海昀 杨书恒 张馨月 董佳欣 刘伟 景志航
审核:宁昕



 官方微信
官方微信